Un classificateur est un ensemble d'un ou plusieurs éléments qui sont liés au maillage de réalité pour fournir une méthode d'identification des parties du maillage représentant des entités physiques. Les formes bidimensionnelles des applications SIG (systèmes d'information géographique) sont particulièrement pratiques et précieuses car elles sont en général géolocalisées et contiennent des données de propriété précieuses. L'utilisation des données de conception pour classifier le modèle de réalité vous permet d'accéder au modèle de réalité comme un ensemble de composants intelligents plutôt qu'une entité unique isolée. La liaison entre le modèle de réalité et les données de conception sous-jacentes étant bidirectionnelle, vous pouvez interroger le modèle SIG pour localiser le maillage de réalité associé ou sélectionner les emplacements sur le modèle de réalité pour accéder aux données de conception sous-jacentes.
Exemple : Classificateurs du modèle de réalité de Philadelphie
En 2015, un modèle de réalité de Philadelphie a été créé pour servir d'aide durant la visite du Pape à Philadelphie. Afin d'expliquer la classification du modèle de réalité, nous allons lier ce modèle avec des données SIG et explorerons la valeur de cette combinaison. Comme la plupart des municipalités, les données SIG de Philadelphie sont facilement disponibles. Le site Web www.opendataphilly.org fournit plus de 300 ensembles de données différents. Commençons par télécharger les données d'empreinte de construction au format SHP.
Les données SHP peuvent être ouvertes directement dans MicroStation et être enregistrées au format DGN pour une question de commodité. Nous ouvrons directement le modèle de réalité dans le format « .3mx » créé par le logiciel ContextCapture et l'enregistrons sous DGN.
Les deux fichiers DGN sont géolocalisés. Cependant, ils peuvent ne pas utiliser les mêmes systèmes de coordonnées géographiques. Heureusement,
MicroStation peut reprojeter les données SIG pour les faire correspondre au système de coordonnées du modèle de réalité. Il n'est toutefois pas possible de reprojeter efficacement les données du modèle de réalité entre les systèmes de coordonnées géographiques (le volume de données rend cette opération irréalisable). Par conséquent, il est important d'utiliser le modèle de réalité comme maître et d'attacher les données de conception comme référence (et éventuellement de les reprojeter) au système de coordonnées géographiques du modèle de réalité.
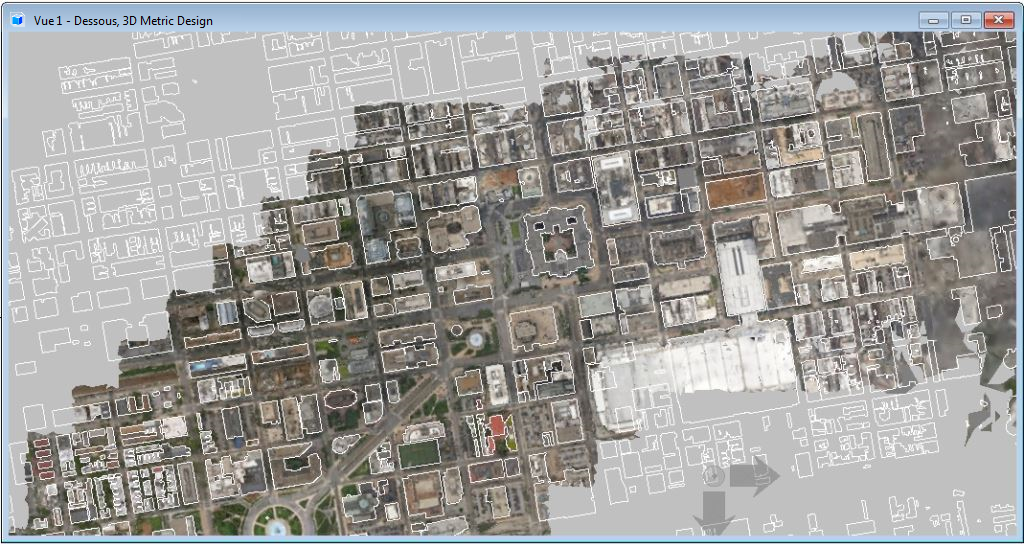
Après avoir attaché les données d'empreinte de construction, vous pouvez visualiser le modèle d'en-dessous et observer que les données d'empreinte correspondent parfaitement au modèle de réalité, confirmant que le modèle de réalité et les données SIG étaient correctement géolocalisés.
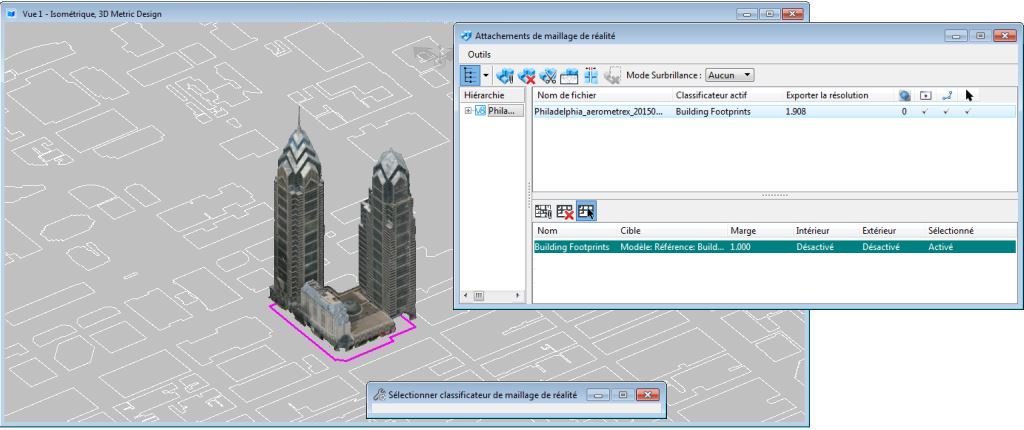
La prochaine étape consiste à attacher la référence d'empreinte de construction comme classificateur au modèle de réalité. Vous pouvez utiliser l'outil
Attacher maillage de réalité pour effectuer cette opération. Dans les spécifications d'outils, sélectionnez
Type comme
Model de sorte que toutes les empreintes de construction dans le modèle référencé fassent partie de la classification et définissez le
Nom comme
Building Footprints. Définissez la
Marge sur
1.0 (mètres), ainsi chaque volume de classification aura un mètre de plus que l'empreinte de construction. Un élément unique dans l'attachement de référence de l'empreinte est sélectionné pour indiquer qu'il s'agit bien du modèle souhaité pour la classification.
Une fois la classification attachée, elle apparaîtra dans la zone de liste inférieure de la boîte de dialogue Attachement de maillage de réalité et sera définie comme Classificateur actif pour l'attachement de modèle de réalité.
Pour visualiser de manière interactive le résultat de la classification nouvellement attachée, vous pouvez utiliser l'outil
Sélectionner classificateur de maillage de réalité et déplacer le curseur sur le modèle de réalité. Quand le maillage de réalité sous le curseur se trouve dans une limite de classification, le volume classifié apparaît dans la couleur de mise en surbrillance. La sélection de la classification de maillage de réalité permet d'ajouter l'objet limite de classification au jeu de sélection actuel et la boîte de dialogue Propriétés peut servir à afficher les propriétés de l'objet.
Maintenant que l'objet de classification est sélectionné, vous pouvez utiliser les spécifications du classificateur pour contrôler son affichage. Les spécifications
Intérieur et
Extérieur contrôlent comment sont affichées les données de maillage de réalité à l'intérieur ou à l'extérieur des limites de la classification actives. La spécification
Sélectionné contrôle comment est représenté le maillage de réalité pour les limites de la classification sélectionnée. En réglant
Intérieur et
Extérieur sur
Off et en plaçant
Sélectionné sur
On, vous pouvez choisir d'afficher uniquement le maillage de réalité pour la limite de classification sélectionnée (voir ci-dessous). Notez que l'outil
Sélectionner classificateur de maillage de réalité continue de fonctionner même si les spécifications
Intérieur et
Extérieur sont
Off, ainsi dans ce mode il est toujours possible de procéder à une sélection interactive depuis le maillage de réalité (désormais invisible).
Avec différents paramétrages des spécifications
Intérieur et
Extérieur, vous pouvez visualiser les données de classification de façon intéressante. Avec
Intérieur :
On et
Extérieur :
Off, vous pouvez afficher uniquement les bâtiments.
En définissant
Extérieur sur :
Dimmed, vous pouvez voir les bâtiments sur un fond estompé du maillage de réalité non classifié. Remarquez que dans ce cas le bâtiment estompé au centre est neuf et absent des données d'empreinte de construction.
De nombreuses classifications différentes peuvent être attachées à un unique modèle de réalité. Ainsi, il est possible de visualiser le même modèle de réalité de nombreuses manières différentes. En attachant un classificateur des corridors commerciaux, vous visualisez le même modèle comme un ensemble de zones plutôt que des bâtiments individuels. Notez que dans ce cas, une distance de marge négative est utilisée pour créer un léger cartouche autour des zones commerciales afin de produire une petite zone extérieure à leurs limites.
Dans la plupart des cas, il est préférable d'utiliser les classificateurs pour contrôler le mode de visualisation du modèle de réalité sans modifier l'attachement du modèle de réalité. Il est, cependant, possible d'utiliser les outils de découpe de maillage de réalité pour découper de manière permanente le modèle aux limites de classification. Par exemple, dans l'exemple de zonage ci-dessus, il est possible de créer des attachements séparés des zones commerciales en sélectionnant les zones (<Ctrl+Clic> permettra de sélectionner plus d'une limite de classification) et en utilisant l'outil Diviser maillage de réalité afin de créer les attachements séparés pour chaque zone et un attachement unique pour les surfaces en dehors des limites sélectionnées.
Classificateurs volumétriques
Dans les exemples précédents, les données SIG 2D ont été utilisées pour classifier les maillages de réalité. Dans ce cas, la géométrie 3D est projetée pour classifier toute la géométrie du modèle de réalité ci-dessus (ou ci-dessous). Il est également possible d'utiliser la géométrie 3D pour englober plus précisément les volumes du maillage de réalité. Actuellement, les volumes peuvent être spécifiés par des dalles, des cylindres et des extrusions non paramétriques. Si une autre géométrie 3D est utilisée, alors le volume classifié est déterminé par la plage de l'élément.
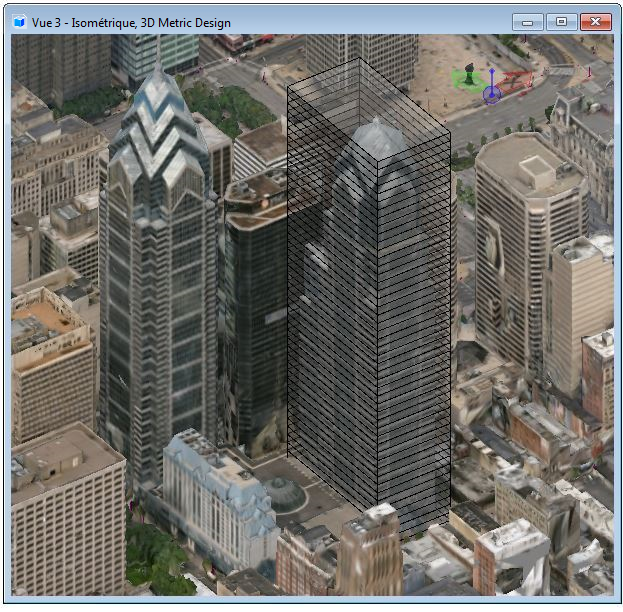
L'exemple ci-dessous représente la classification des différents étages d'un bâtiment plutôt que celle du bâtiment dans son intégralité. Une série de dalles fournit les classificateurs. Les propriétés des étages (occupants, taux de location, etc) peuvent être consultées en sélectionnant de manière interactive le modèle de réalité pour accéder à ces classificateurs.
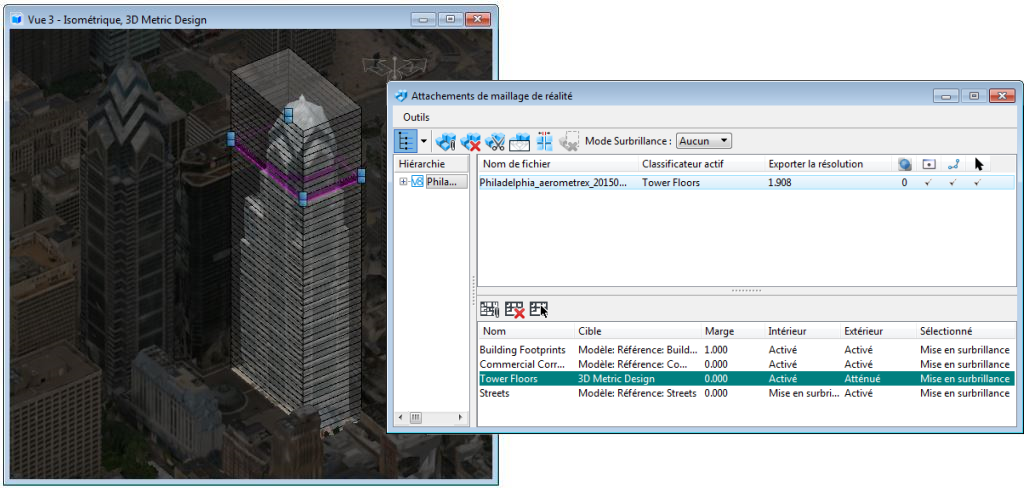
L'activation du classificateur « Étage de la tour » et la sélection de
Dimmed pour le monde d'affichage
Extérieur met en surbrillance le bâtiment d'intérêt. Avec l'outil
Sélectionner classificateur de maillage de réalité, vous pouvez sélectionner les différents étages de tour.