Two-way stop-controlled intersections
This section describes two-way stop-controlled intersections. Topics include:
The two-way-stop-controlled (HCM 2000/2010) model offered by CUBE Voyager is a gap-acceptance model calibrated against traffic conditions in USA. Users in other countries may need to adjust the base critical gap and base follow-up time to reflect local conditions. The method is designed for steady-state conditions, i.e. the demand and capacity conditions are constant during the analysis period. The model can be used to analyze the capacity, delay, queue and LOS of two-way-stop-controlled (TWSC) intersections. The low flow delay is the inverse of the capacity for TWSC intersections.
The capacity model, which has been implemented in CUBE Voyager, is a gap-acceptance model that has been calibrated against traffic conditions in the USA. Users in other countries may need to adjust the base critical gap and base follow up time to reflect local conditions.
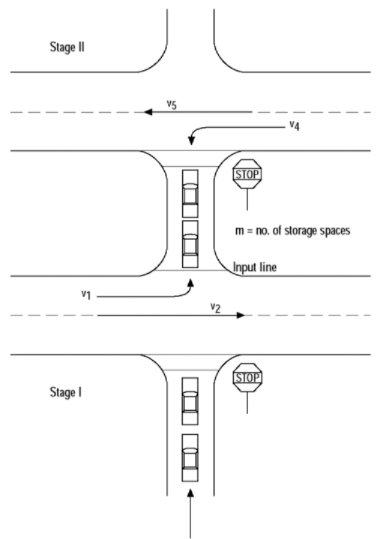
If there is a central reservation, or there are islands, between the lanes of the major road, minor road traffic, which crosses the major road, may do so in two stages. First the vehicle crosses to the central reservation; then it completes its movement through the intersection. This situation is enabled when a non-zero value of storage space is coded. The value is the number of vehicles which can wait in the center of the major road without obstructing major road flows.
-
Brilon, W., and M. Großmann. Aktualisiertes Berechnungsverfahren für Knotenpunkte ohne Lichtsignalanlagen. Forschung Strassenbau und Strassenverkehrstechnik, Heft 596, 1991.
-
Transportation Research Board. Highway Capacity Manual 2000.
-
Transportation Research Board. Highway Capacity Manual 2010.
This section describes the keywords for two-way stop-controlled intersections:
Note: Keywords are case insensitive. For example, capitalizing as CriticalGap might improve readability.
The critical gap, in seconds, is one of the parameters of any gap- acceptance capacity model. At two-way stop-controlled intersections, it is applicable by movement. It is defined as the minimum time interval in a higher priority stream that allows intersection entry for one vehicle. Note that the coded value is the base critical gap. It is modified to allow for junction geometry.
The default value depends on the movement:
Normally this value is allowed to default; only code when there are observations indicating site-specific driver behavior at the intersection.
The number of vehicles that may queue in the flared region of a minor approach without disrupting the flowing or queueing of traffic in the main lane.
By default this value is zero, that is, no or negligible flare.
The follow-up time, in seconds, is one of the parameters of any gap- acceptance capacity model. At two-way stop-controlled intersections, it is applicable by movement. It is defined as the time between the departure of one vehicle the next using the same gap in a higher priority stream, under a condition of continuous queuing on the entry.
The default value depends on the movement:
Normally this value is allowed to default; only code when there are observations indicating site-specific driver behavior at the intersection.
This logical-valued keyword determines the number of lanes on the major road of a two-way stop-controlled intersection. If FourLaneMajor = y is coded, then the major road has two lanes in each direction (total four); otherwise the major road has one lane in each direction (total 2).
This value is only relevant for major approaches where FOURLANEMAJOR is false. It is the capacity for the unmodelled movements from the arm. By default, these movements have infinite capacity, which, when combined with the capacity of the modelled turn, gives strange large capacities in the results. If you code a sensible value (such as 1800 vph), the resulting capacity will be reduced, but there will be a corresponding increase in delays.
The real-valued keyword GRADE describes the grade, expressed as a percentage, of an approach to a geometrically modeled signals or a two-way stop-controlled intersection. It is a signed value; negative values indicate that the approach is downhill and positive values indicate that the approach is uphill.
By default the approach is assumed to be flat (GRADE=0).
The models have been calibrated for grades the range -6% to +11%, but more extreme grades do occur. For example the maximum grade in San Francisco is about 31%.
The number of pedestrian platoons crossing the approach per hour.
Pedestrians may cross the road singly, or they may cross in groups, two or three abreast. Each such group counts as one pedestrian platoon. For more details of pedestrian platoons refer to:
-
If using HCM 2000 methodology - refer to Equation 18-18 of HCM 2000 manual.
-
If using HCM 2010 methodology - refer to Equation 19-70 of HCM manual.
The average speed at which pedestrians cross the approach in feet or meters per second. By default this value is 1.2 meters or, equivalently, 4 feet per second.
The logical-valued keyword is used to indicate that an approach consists of a single lane. It is applicable to many junction types:
-
Signals:
Geometric Data - SINGLELANE may be coded.
Saturation Flows - SINGLELANE may be coded.
-
All-way stop-controlled intersection:
SINGLELANE may not be coded.
code NUMBEROFLANES = 1.
-
Two-way stop-controlled intersection:
SINGLELANE may be coded for minor road.
Use FOURLANEMAJOR to describe major road.
-
Priority intersection (two-way yield-controlled intersection):
Geometric Data - SINGLELANE may be coded for minor arms. Major road width in meters, not lanes.
Saturation Flows - SINGLELANE may be coded.
-
Roundabout:
Empiical - SINGLELANE may be coded.
Gap Acceptance - SINGLELANE may be coded.
Coding SINGLELANE = Y for an approach precludes the use of EXCLUSIVELANES, CANSHARERIGHT, or CANSHARELEFT on that approach.
At two-way stop-controlled intersections and priority junctions, a minor arm, which does not have SINGLELANE=Y explicitly coded, has two lanes.
This keyword is used if number of lanes on major street crossing the two-way stop intersection is more than 2. If it is more than 3 and used as SIXLANEMAJOR.
This integer-valued keyword applies to two-way stop-controlled intersections. It is the number of vehicles (PCU) that can wait in the central reservation without impeding major road traffic. It does not matter whether the central reservation is curbed or striped (ghost islands).
The turn referred to is the turn which follows the curb (by default, the right turn; when LEFTDRIVE = T, the left turn). The turn is said to be channelized if there is a triangular, curbed island separating the turners from the other movements on the approach. The effect of turn channelization is ensure that the turning flows do not act as conflicting flows during the calculation of capacities on other legs.
Setting TURNCHANNELIZED to T for an approach indicates that the unopposed turn from that approach is channelized. By default, no turns are channelized.
The example describes a two-way-stop-controlled intersection with two-lane majors, two-lane minors and a central reservation.
Junction Node = 9 Type = TwoWayStop Approach1 = 8, FourLaneMajor = y, StorageSpace = 3, Approach = 6, TurnChannelized = y, Approach = 7, Approach = 8, Approach = 5,