G.17.2.8 Advanced Nonlinear Cable Analysis
When all of the members, elements, and support springs are linear except for cable members, then this analysis type may be used.
You have control of the number of steps, the maximum number of iterations per step, the convergence tolerance, include/exclude Kg matrix and use full/modified Newton-Raphson method.
The nonlinear static solver employs the Newton method (full Newton or modified Newton method) to analyze nonlinear problems. In STAAD.Pro, cable elements and P-Delta effect in beam/column and plates cause geometric nonlinearity.
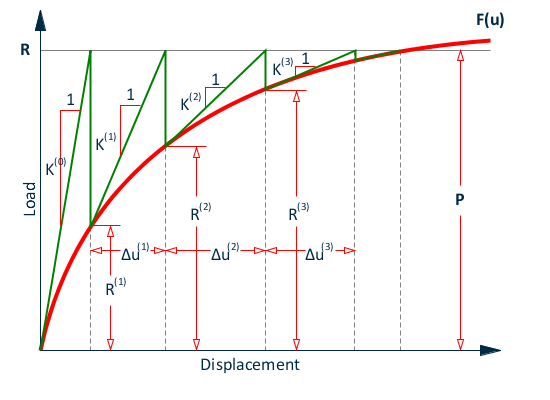
Numerical representation of the nonlinear static solver with full Newton method
Steps Included in the Analysis
The nonlinear static analysis has several steps.
-
Final applied loading vector {Pext} is assembled. Incremental load vector {P} = {Pext}/nSteps is calculated where nSteps is the number of load steps. {uprev}= {0} is also defined
-
For the first iteration, the unbalanced loading {ΔP}={P} and displacement vector {u}={uprev}, the stiffness matrix [K] are assembled. If any elements are performing nonlinearly, their element stiffness matrix will be determined based on their current nonlinear status.
-
The equation [K]{Δu} ={ΔP} is solved to find out the incremental displacement {Δu}.
-
The current displacement vector is calculated as {u} ={u}+{Δu}.
-
This newly calculated {u} is used to update all elements nodal coordinates.
-
Based on the updated elements, the element reaction {R} is calculated.
-
The unbalanced loading now becomes {ΔP}={P}-{R}.
-
Convergence is checked by comparing |{ΔP}|/{P} with ε. If convergence is achieved the current displacement is saved as the displacement of previous iteration, i.e. {uprev} = {u}. The next load increment is applied and same all steps are repeated.
-
If convergence is not achieved, steps 2-7 are repeated until convergence is achieved or the maximum iteration number is reached.
Theory of Cable Elements
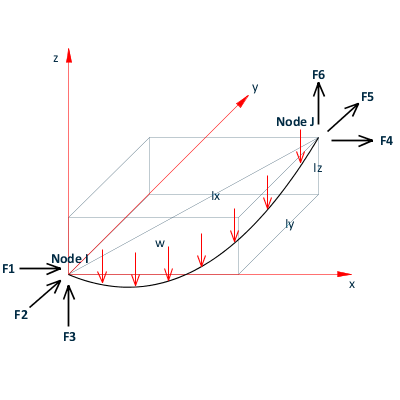
3D cable sketch
The cable element formulation follows the catenary theory. It is a nonlinear element with geometric nonlinearity, but without material nonlinearity. For a 3D cable element shown in Figure 2, the free body equilibrium is:
| (1a) |
| (1b) |
| (1c) |
With geometrical constraint equations and constitutive equations, the relationship between chord length components lx, ly, lz and end support force components F1, F2, F3 could be derived as:
| (2a) |
| (2b) |
| (2c) |
Then the derivative express of equation (2) is the flexibility matrix, as shown in equation (3). For brevity, the terms in the equation are not listed.
| (3) |
The inverse of the flexibility matrix is the stiffness matrix. So the deformation-force relationship and the stiffness matrix are found. Hence the nonlinear equations can be solved using the finite element analysis solvers.
In the step list of the nonlinear static solver, step 4 will provide the cable element the new updated displacement. And step 2 and step 5 will ask the cable element’s stiffness matrix and reaction forces, which can be calculated with equation (3).
Limitation of cable elements
One limitation of using catenary theory is that the cable element cannot be loaded with non-uniformly distributed load, point load inside the element. In order to do such doing, the physical cable must be modeled with multiple analytical cable elements, so that the non-uniform load could be approximately simulated by uniform loads on each analytical cable elements, and there are nodes at locations where point loads are applied.
Notes
The load cases in a nonlinear cable analysis must be separated by the CHANGE command and PERFORM CABLE ANALYSIS ADVANCED command. The SET NL command must be provided to specify the total number of primary load cases. There may not be any Multi-linear springs, compression only, PDelta, NONLINEAR, or dynamic cases.
Also for cables:
-
Do not use Member Offsets.
-
Do not include the end joints in a Control/Dependent command.
-
Do not connect to inclined support joints.
-
Y direction must be up.
-
Do not impose displacements.
-
Do not use Support springs in the model.
-
Applied loads do not change global directions due to displacements.
-
Do not apply Prestress load, Fixed end load.
-
Do not use Load Combination command to combine cable analysis results. Use a primary case with Repeat Load instead.