点回归线

您可以通过以下方式访问此对话框:
点回归线工具会采用一组点并按适当顺序放置它们,从而创建一个线串(回归线)。此工具预计的数据通常为测量数据,表示中心线或轨道读数。这些点以 xy 对形式显示。此工具中不涉及任何点高程,但如果执行垂直回归分析,则应为这些点定义高程。如果点包含高程信息,则还会将表示点高程的垂直纵断面添加至所创建的回归线。
为工具提供第一个点和第二个点。第一个数据点标识点组内的起始点。第二个数据点标识点组内的相邻点。这两个点可指定方向(从第一个标识点朝向回归线),从第一个标识点开始,朝向第二个标识点。使用此工具进行工作时,点编号并不重要。
排序点
用户标识的第一个点和第二个点建立起始点和沿回归点串的方向。第一个数据点标识点组内的起始点。第二个数据点标识点组内的相邻点。这两个点可指定方向(从第一个标识点朝向第二个标识点)。两个点具有一定的顺序 - 软件的任务是找到下一个点,然后再找到下一个点,以此类推。一次仅排序一个其他回归点,如下所述。
搜索下一个回归点时,工具首先搜索候选点。搜索从当前点(最近建立的回归点)开始。视为候选点的点必须满足三项测试。它们必须大于最小距离公差;必须小于最大距离公差;必须处于某特定区域内,这一区域将搜索限制在处于之前已排序点的路径中的那些点。
该区域涵盖通过当前点和上一个点所投影的直线的两侧区域。投影线两侧的区域范围等于在最大偏差参数中定义的距离。
下图用小圆和大圆分别表示最小和最大距离公差。(点 1 为当前点。)在三条虚线中,中间一条用于标识通过当前点 (1) 和上一个点所投影的直线。上虚线和下虚线(即按最大偏差产生的相对于中间虚线的偏移)表示该区域的范围。仅处于该区域范围内的点才被视为候选点。
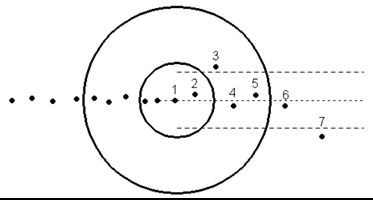
以下列表描述了图中每个已编号的点,并指出该点是否是下一个回归点的候选点。如果该点不是候选点,则会给出原因。
两个候选点为点 4 和点 5。由于点 4 最接近当前点,因此它成为下一个回归点。继续执行命令时,点 4 成为当前点,并再次开始搜索下一个点。