ACS-Typ
Es gibt verschiedene ACS-Typen: Rechtwinklig, zylindrisch und sphärisch.
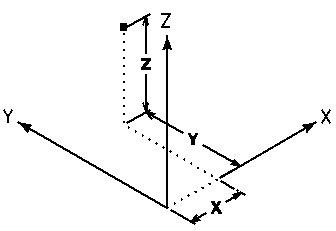
Rechtwinklig
Punkte werden wie im Koordinatensystem des Zeichnungsraums angegeben, mit Koordinaten in der Form (X,Y,Z). Sie können AccuDraw zum Definieren, Speichern und Abrufen von rechtwinkligen ACS verwenden.
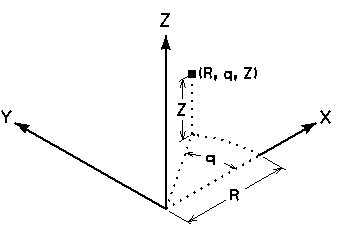
Zylindrisch
Punkte werden durch zwei Größen (R und Z) und einen Winkel (q) definiert. Koordinaten werden in der Form (R, q, Z) angegeben.
Den Vorgang zum Bestimmen eines Punktes in einem zylindrischen ACS kann man sich wie folgt vorstellen:
- Vom Ursprung aus entlang der x-Achse bis zum Wert R bewegen.
- Drehung im Winkel q um die z-Achse.
- Dann parallel zur z-Achse bis zum Wert Z bewegen.
Diese werden verwendet, um einen Datenpunkt mit einem zylindrischen ACS zu positionieren:
-
AX=R,q,Z für eine genaue Position, wobei folgendes gilt:
R ist der Abstand vom Ursprung entlang der x-Achse.
q ist der Winkel gegen den Uhrzeigersinn von der x-Achse um die z-Achse.
Z ist der Abstand in die z-Richtung.
-
AD=ΔR,Δq,ΔZ für Positionen relativ zu einem Tentativpunkt, wobei folgendes gilt:
ΔR ist die Abstandsdifferenz vom Ursprung entlang der x-Achse.
Δq ist die Winkeldifferenz gegen den Uhrzeigersinn von der x-Achse.
ΔZ ist die Abstandsdifferenz in die z-Richtung.
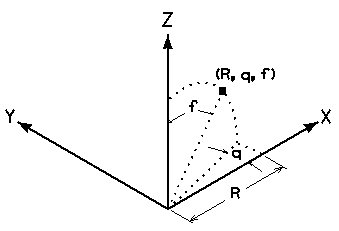
Sphärisch
Punkte werden durch eine Größe (R) und zwei Winkel (q and f) definiert. Koordinaten werden in der Form (R, q, f) angegeben.
Den Vorgang zum Bestimmen eines Punktes in einem sphärischen ACS kann man sich wie folgt vorstellen:
- Bewegen Sie sich vom Ursprung aus entlang der x-Achse bis zum Wert R, um einen Radiusvektor festzulegen.
- Drehen dieses Vektors im Winkel q um die z-Achse.
- Der Winkel f ist der Winkel zwischen dem Radiusvektor und der positiven z-Achse.
Diese Eingaben werden verwendet, um einen Datenpunkt mit einem kugelförmigen ACS zu positionieren:
-
AX=R,q,f für eine genaue Position, wobei folgendes gilt:
R ist der Radiusvektorabstand vom Ursprung.
q ist der Winkel gegen den Uhrzeigersinn von der x-Achse um die z-Achse.
f ist der Winkel zwischen dem Radiusvektor und der z-Achse.
-
AD=ΔR,Δq,Δf für Positionen relativ zu einem Tentativpunkt, wobei folgendes gilt:
ΔR ist der Unterschied des Radiusvektorabstands vom Ursprung.
Δq ist die Winkeldifferenz gegen den Uhrzeigersinn von der x-Achse.
Δf ist der Unterschied im Winkel zwischen dem Radiusvektor und der z-Achse.