您可以选择以下 ACS 类型:直角、圆柱面和球面。
直角
像在设计立方体坐标系中一样指定点,坐标以 (X,Y,Z) 的形式表示。您可以使用精确绘图来定义、保存和检索直角 ACS。
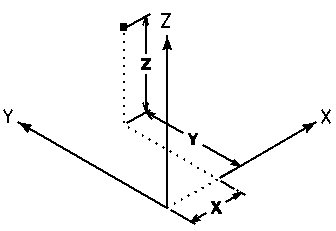
直角 ACS
圆柱面
以两个幅值(R 和 Z)和一个角度 (q) 的形式指定点,坐标以 (R, q, Z) 的形式表示。
可以按如下过程定位圆柱面 ACS 中的点:
- 从原点沿 X 轴移动一段距离 R。
- 绕 Z 轴旋转一个角度 q。
- 最后,平行于 Z 轴移动一段距离 Z。
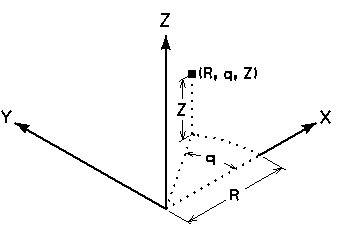
圆柱面 ACS
注释: 二维环境中没有深度(Z 轴),圆柱面坐标通常称为
极坐标。
以下键入命令用于使用圆柱面 ACS 放置数据点:
-
AX=R,q,Z 用于精确定位,其中:
R 是从原点出发沿 X 轴的距离。
q 是从 X 轴绕 Z 轴逆时针旋转的角度。
Z 是 Z 方向上的距离。
-
AD=ΔR,Δq,ΔZ 用于相对于试探点进行定位,其中:
ΔR 是从原点出发沿 X 轴的距离差值。
Δq 是从 X 轴逆时针旋转的角度差值。
ΔZ 是 Z 方向上的距离差值。
球面
通过一个幅值 (R) 和两个角度(q 和 f)指定点,坐标以 (R, q, f) 的形式表示。
可以按如下过程定位球面 ACS 中的点:
- 从原点沿 X 轴移动一段距离 R 以建立半径矢量。
- 绕 Z 轴将此矢量旋转一个角度 q。
- 角度 f 是半径矢量与正 Z 轴之间的角度。
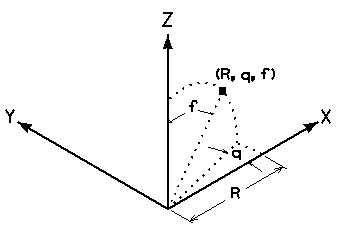
球面 ACS
以下键入命令用于使用球面 ACS 放置数据点:
-
AX=R,q,f 用于精确定位,其中:
R 是从原点出发的半径矢量距离。
q 是从 X 轴绕 Z 轴逆时针旋转的角度。
f 是半径矢量与 Z 轴之间的角度。
-
AD=ΔR,Δq,Δf 用于相对于试探点进行定位,其中:
ΔR 是从原点出发的半径矢量距离差值。
Δq 是从 X 轴逆时针旋转的角度差值。
Δf 是半径矢量与 Z 轴之间的角度差值。