ACS Type
You can choose from these ACS types: Rectangular, Cylindrical, and Spherical.
Rectangular
Points are specified like the design cube coordinate system, with coordinates expressed in the form (X,Y,Z). You can use AccuDraw to define, save, and retrieve rectangular ACSs.
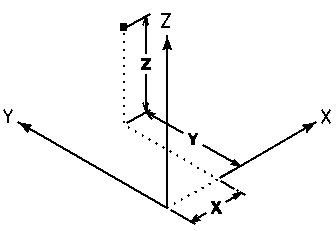
Cylindrical
Points are specified as two magnitudes (R and Z) and an angle (q), with coordinates expressed in the form (R, q, Z).
The process of locating a point in a cylindrical ACS can be thought of as follows:
- Moving from the origin along the x-axis a distance of R.
- Rotating about the z-axis at an angle of q.
- Finally, moving parallel to the z-axis a distance of Z.

These are used to position a data point with a Cylindrical ACS:
-
AX=R,q,Z for an exact location,
where:
R is the distance from the origin, along the x-axis.
q is the angle counterclockwise from the x-axis about the z-axis.
Z is the distance in the z-direction.
-
AD=ΔR,Δq,ΔZ for locations relative to
a tentative point, where:
ΔR is the difference in distance from the origin, along the x-axis.
Δq is the difference in the angle counterclockwise from the x-axis.
ΔZ is the difference in the distance in the z-direction.
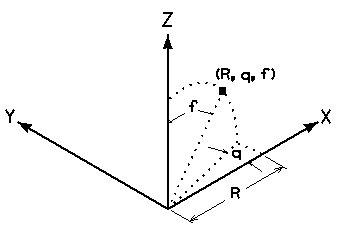
Spherical
Points are specified by a magnitude (R) and two angles (q and f), with coordinates expressed in the form (R, q, f).
The process of locating a point in a spherical ACS can be thought of as follows:
- Move from the origin along the x-axis a distance of R to establish a radius vector.
- Rotate this vector about the z-axis at an angle of q.
- The angle f is the angle between the radius vector and the positive z-axis.
These key-ins are used to position a data point with a Spherical ACS:
-
AX=R,q,f for an exact location,
where:
R is the radius vector distance from the origin.
q is the angle counterclockwise from the x-axis about the z-axis.
f is the angle between the radius vector and the z-axis.
-
AD=ΔR,Δq,Δf for locations relative to
a tentative point, where:
ΔR is the difference in the radius vector distance from the origin.
Δq is the difference in the angle, counterclockwise, from the x-axis.
Δf is the difference in the angle between the radius vector and the z-axis.