補助座標系は、「長方形」、「円筒形」、「球」の3つのタイプから選択します。
長方形
点の指定方法はデザイン空間座標系と同じで、座標系を(X,Y,Z)の形式で表します。アキュドローを使用して長方形補助座標系を定義し、保存し、呼び出すことができます。
長方形補助座標系
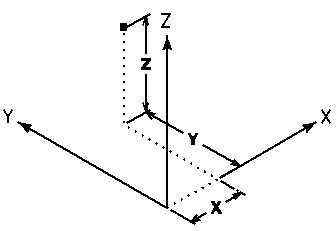
円筒形
2つの大きさ(RおよびZ)と1つの角度(q)で点を指定し、座標は(R, q, Z)の形式で表されます。
円筒形補助座標系で点を定義する手順は、次のように考えることができます。
- 原点からX軸に沿って距離Rだけ移動する。
- Z軸の周りに角度qだけ回転させる。
- 最後に、Z軸と平行に距離Zだけ移動する。

円筒形補助座標系
注記: 2次元の場合、奥行き(Z軸)はなく、円筒形座標は一般に
極座標と呼ばれます。
円筒形補助座標系では、データ点の位置が次のように示されます。
球形
1つの大きさ(R)と2つの角度(qおよびf)で点を指定し、座標は(R, q, f)の形式で表されます。
球補助座標系で点を定義する手順は、次のように考えることができます。
- 原点からX軸に沿って距離Rだけ移動し、半径ベクトルを設定する。
- ベクトルをZ軸の周りに角度qだけ回転させる。
- 角度fは、半径ベクトルと正のZ軸との間の角度。
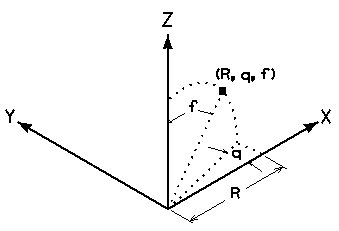
球補助座標系
球補助座標系では、次のキー入力を使ってデータ点の位置を示します。