Un clasificador es un conjunto de uno o más elementos vinculados a la malla de realidad para proporcionar un método para identificar las partes de la malla que representan las entidades físicas. Las formas bidimensionales de las aplicaciones GIS (Geographic Information Systems, sistemas de información geográfica) son especialmente prácticas y valiosas porque están habitualmente localizadas geográficamente y contienen datos de propiedad valiosos. Al usar los datos de diseño para clasificar el modelo de realidad, puede acceder al modelo de realidad como conjunto de componentes inteligentes en vez de una única entidad aislada. El vínculo entre el modelo de realidad y los datos de diseño subyacentes es bidireccional para que pueda consultar el modelo GIS para localizar la malla de realidad asociada o seleccionar las localizaciones en la malla de realidad para acceder a los datos de diseño subyacentes.
Ejemplo: Clasificadores del modelo de realidad de Filadelfia
En 2015, se creó un modelo de realidad de Filadelfia para ayudar en la visita del papa a Filadelfia. Para demostrar la clasificación del modelo de realidad, vincularemos este modelo con los datos GIS y exploraremos el valor de esta combinación. Como para la mayoría de los municipios, los datos del GIS de Filadelfia están disponibles. El sitio Web www.opendataphilly.org proporciona aproximadamente 300 conjuntos de datos diferentes. Comencemos descargando los datos de la huella de memoria del edificio en formato SHP.
Los datos SHP se pueden abrir directamente en MicroStation y guardar en formato DGN para su comodidad. También abrimos directamente el modelo de realidad en formato de .3mx creado por el software ContextCapture y lo guardamos como DGN.
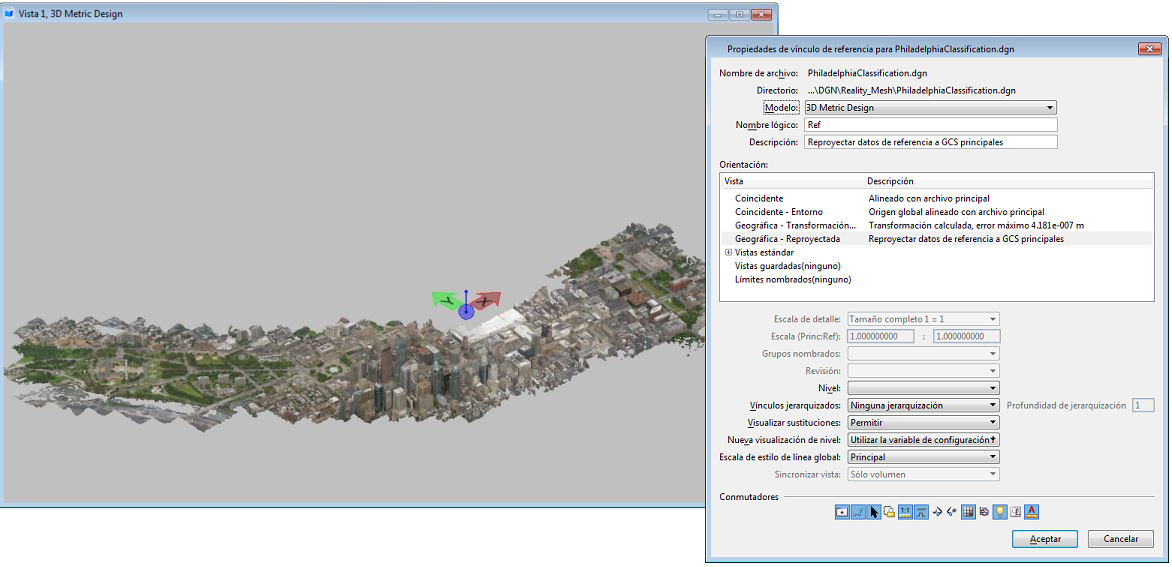
Ambos archivos DGN están localizados geográficamente. Sin embargo, puede que no utilicen los mismos sistemas de coordenadas geográficas. Afortunadamente,
MicroStation puede reproyectar los datos GIS para que coincidan con el sistema de coordenadas del modelo de realidad. No es posible, sin embargo, reproyectar los datos del modelo de realidad de manera eficiente entre los sistemas de coordenadas geográficas (el volumen de datos imposibilita esta operación). Por lo tanto, es importante utilizar el modelo de realidad como el principal y vincular como referencia (y potencialmente reproyectar) los datos de diseño con el sistema de coordenadas geográficas del modelo de realidad.
Después de vincular los datos de la huella de memoria del edificio, puede ver el modelo desde debajo y observar que los datos de huella de memoria del edificio coinciden con el modelo de realidad muy bien, confirmando que el modelo de realidad y los datos GIS eran geoespacialmente exactos.
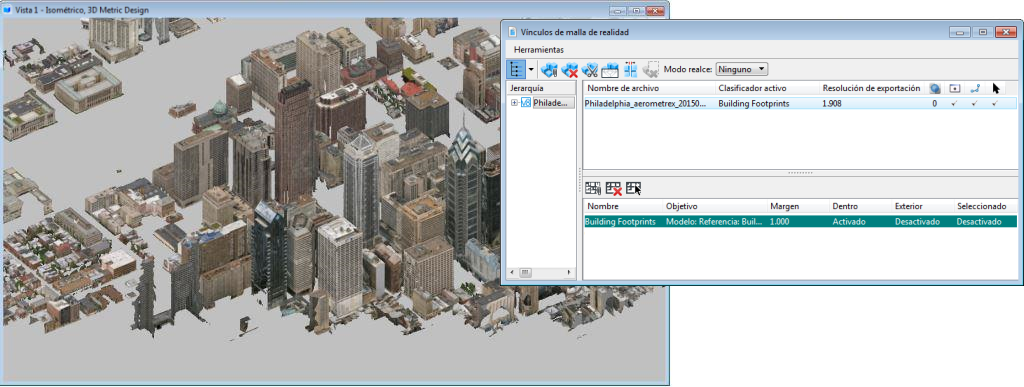
El siguiente paso es vincular la referencia de huella de memoria del edificio como clasificador con el modelo de realidad. Puede utilizar la herramienta
Vincular malla de realidad para esto. En los ajustes de herramienta, seleccione
Tipo como
Model para que todos los datos de la huella de memoria del edificio en el modelo referenciado sean parte de la clasificación, y defina
Nombre como
Building Footprints. Defina
Margen en
1.0 (metros), que designa que cada volumen de clasificación será un metro más grande que la huella de memoria del edificio. Se selecciona un elemento único del vínculo de referencia de la huella de memoria del edificio para designar que es el modelo deseado para la clasificación.
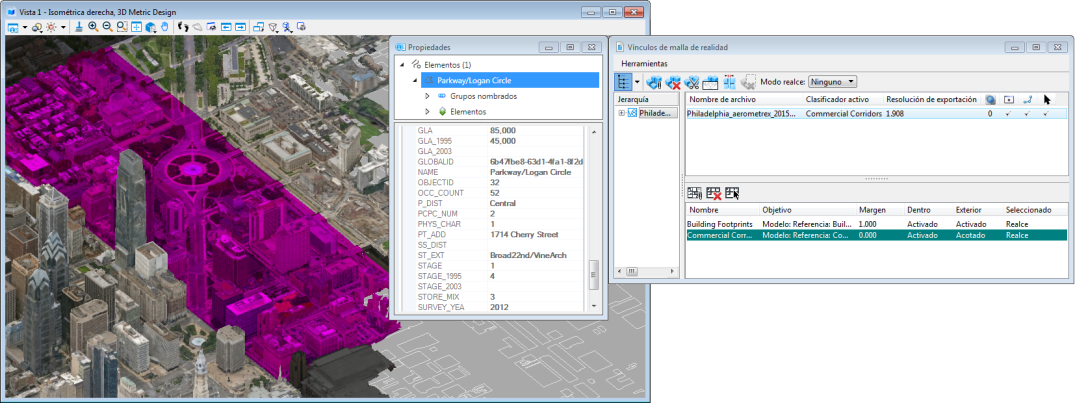
Una vez vinculada la clasificación, aparecerá en el cuadro de lista inferior del diálogo Vínculo de malla de realidad y estará definida como Clasificador activo para el vínculo del modelo de realidad.
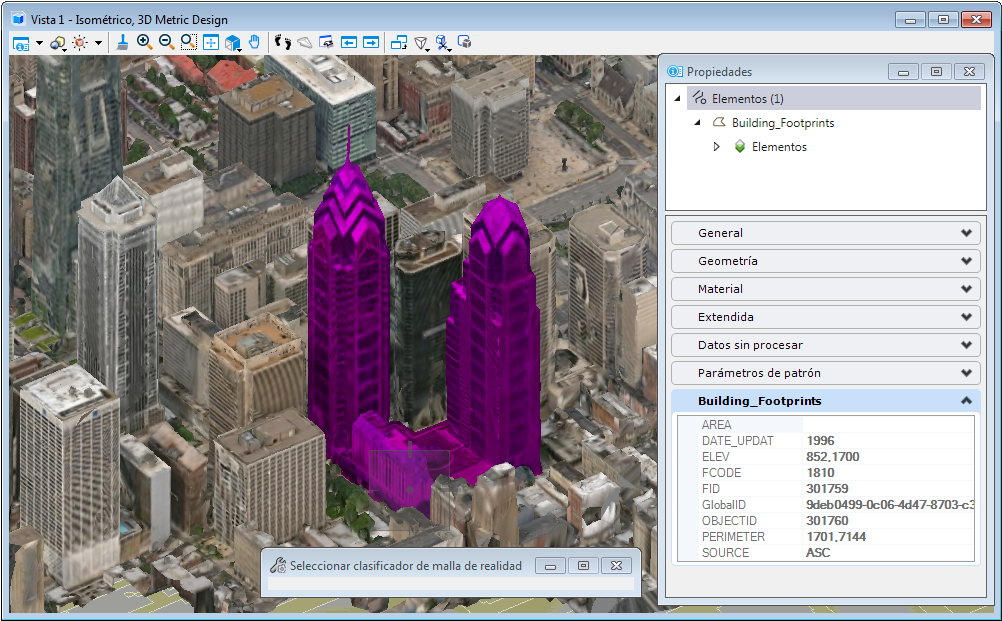
Para ver de manera interactiva el resultado de la clasificación Recién vinculada, puede utilizar la herramienta
Seleccionar clasificador de malla de realidad y mover el cursor sobre el modelo de realidad. Cuando la malla de realidad debajo del cursor esté dentro de un límite de clasificación, el volumen clasificado parpadea en el color de resaltado. Al elegir la clasificación de la malla de realidad, se añadirá el objeto del límite de la clasificación al conjunto de selección actual y el diálogo Propiedades se podrá utilizar para ver las propiedades del objeto.
Ahora que el objeto de clasificación está seleccionado, puede utilizar los ajustes de Clasificador para controlar su visualizado. Los ajustes
Dentro y
Fuera controlan cómo se visualizan los datos de malla de realidad dentro o fuera de los límites activos de la clasificación. El ajuste
Seleccionado controla cómo se representa la malla de realidad para los límites de clasificación seleccionados. Definiendo
Dentro y
Fuera en
Off, y
Seleccionado en
On, puede aislar para visualizar solamente la malla de realidad para el límite de clasificación seleccionado (véase abajo). Tenga en cuenta que la herramienta
Seleccionar clasificado de malla de realidad sigue funcionando con los ajustes
Dentro y
Fuera definidos en
Off, así que en este modo es posible continuar seleccionando de manera interactiva de la malla de realidad (ahora invisible).
Con diferentes ajustes de
Dentro y
Fuera, puede ver los datos de clasificación de maneras interesantes. Con
Dentro: definido en
On y
Fuera: definido en
Off, solo puede visualizar los edificios.
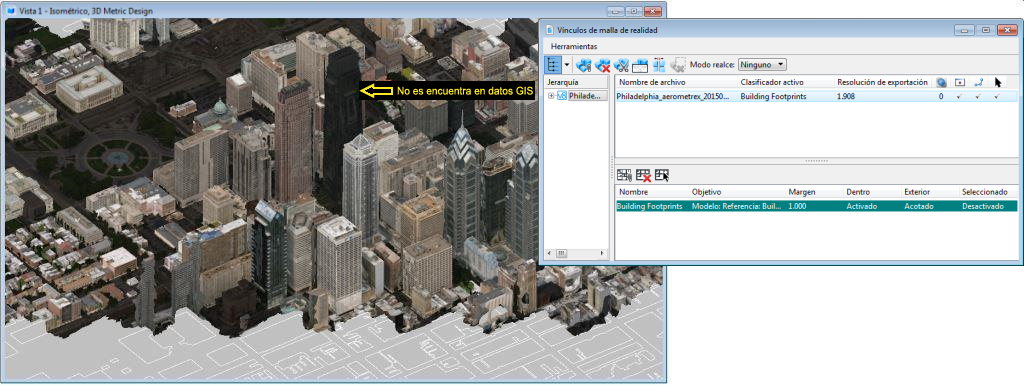
Definiendo
Fuera:
Dimmed, puede ver los edificios contra un fondo atenuado de la malla de realidad sin clasificar. Tenga en cuenta que en este caso el edificio atenuado del centro es nuevo y falta de los datos de la huella de memoria del edificio.
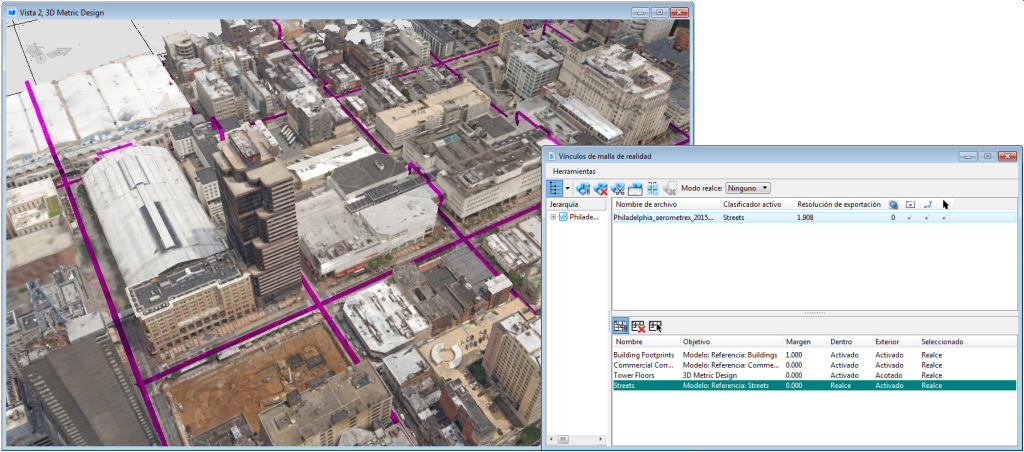
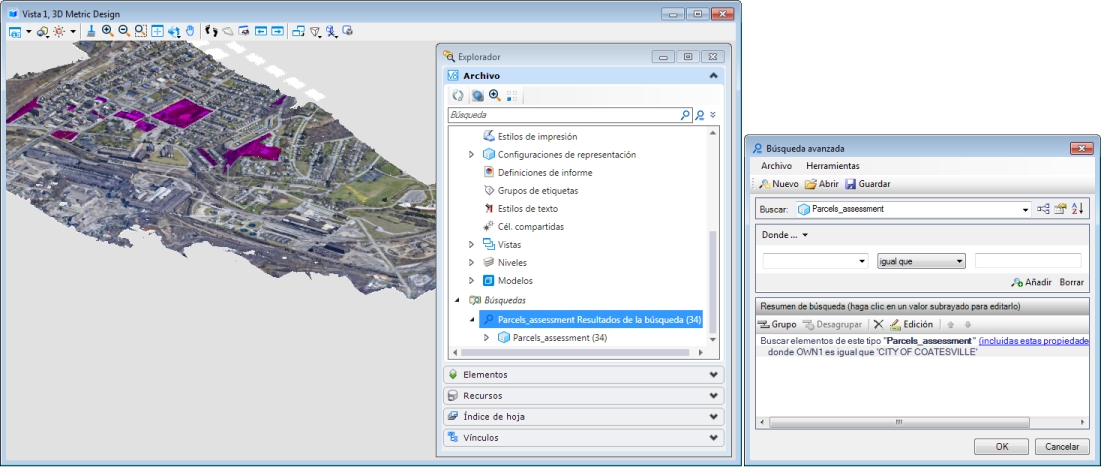
Se pueden vincular muchas clasificaciones diferentes a un único modelo de realidad. Esto proporciona muchas maneras diferentes de ver el mismo modelo de realidad. Al vincular un clasificador de los corredores comerciales, ve el mismo modelo como un conjunto de zonas en vez de edificios individuales. Tenga en cuenta que en este caso se usa una distancia negativa de la margen para insertar levemente las zonas comerciales para crear una pequeña zona fuera en sus límites.
En la mayoría de los casos, es preferible utilizar clasificadores para controlar cómo se ve el modelo de realidad sin cambiar el vínculo del modelo de realidad. Sin embargo, es posible utilizar las herramientas de recorte de la malla de realidad para recortar permanentemente el modelo en los límites de clasificación. Por ejemplo, en el ejemplo de las zonas anterior, es posible crear vínculos separados para las zonas comerciales seleccionando las zonas (<Ctrl+Clic> permitirá la selección de más de un límite de clasificación) y usando la herramienta Partir malla de realidad para crear vínculos separados para cada zona y un único vínculo para las áreas fuera de los límites seleccionados.
Clasificadores de punto y lineal
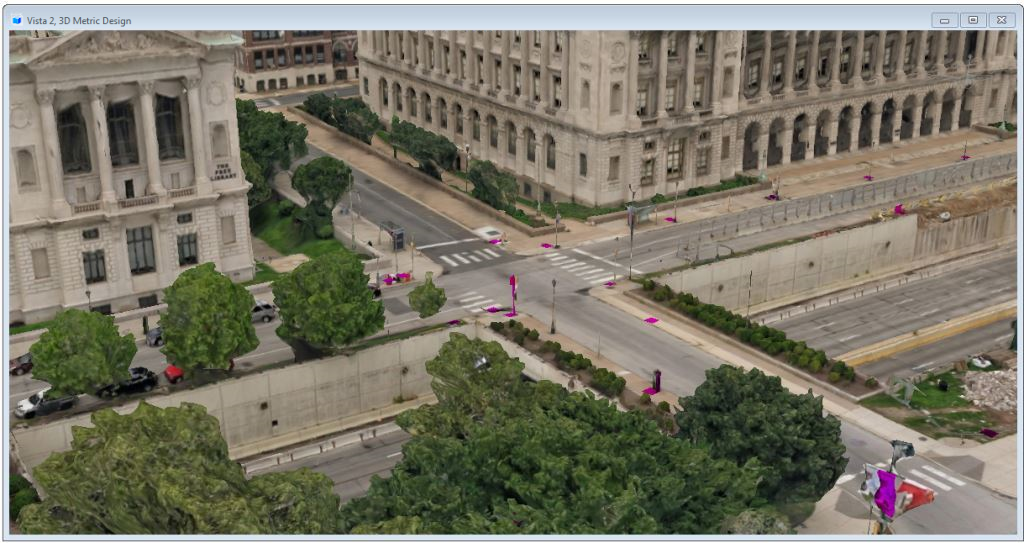
La geometría lineal 2D es importante en GIS, Civil y otras disciplinas, ya que es de uso frecuente para carreteras, vías férreas, canales o límites. Los datos de punto se utilizan con frecuencia para representar las ubicaciones de interés o propiedades verticales, como señales o postes telefónicos. Aunque esta geometría sola no incluya un área que se pueda proyectar para producir un volumen de clasificación, puede combinarse con el ajuste Margen para producir volúmenes de clasificación que incluyan y rodeen la geometría.
Clasificadores volumétricos
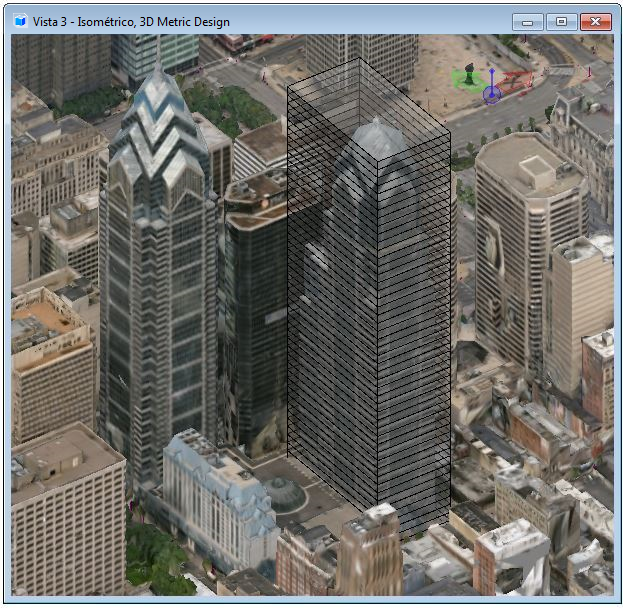
En los ejemplos anteriores, los datos GIS 2D se han utilizado para clasificar las mallas de realidad. En este caso, la geometría 3D se proyecta para clasificar toda la geometría del modelo de realidad de arriba (o de abajo). Es también posible utilizar la geometría 3D para incluir con más exactitud los volúmenes de la malla de realidad. Actualmente, los volúmenes se pueden especificar por paralelepípedos, cilindros y extrusiones no paramétricas. Si se utiliza la otra geometría 3D, entonces, el volumen clasificado es determinado por el rango del elemento.
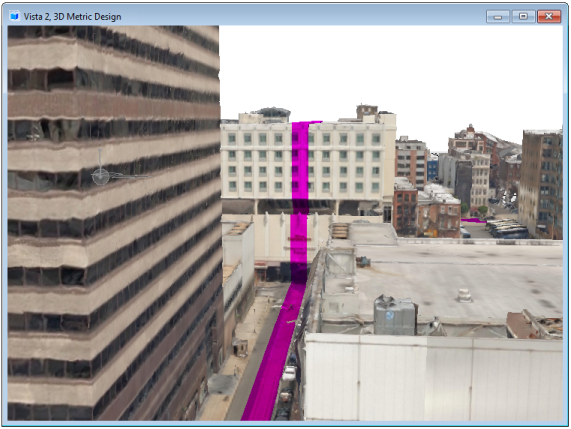
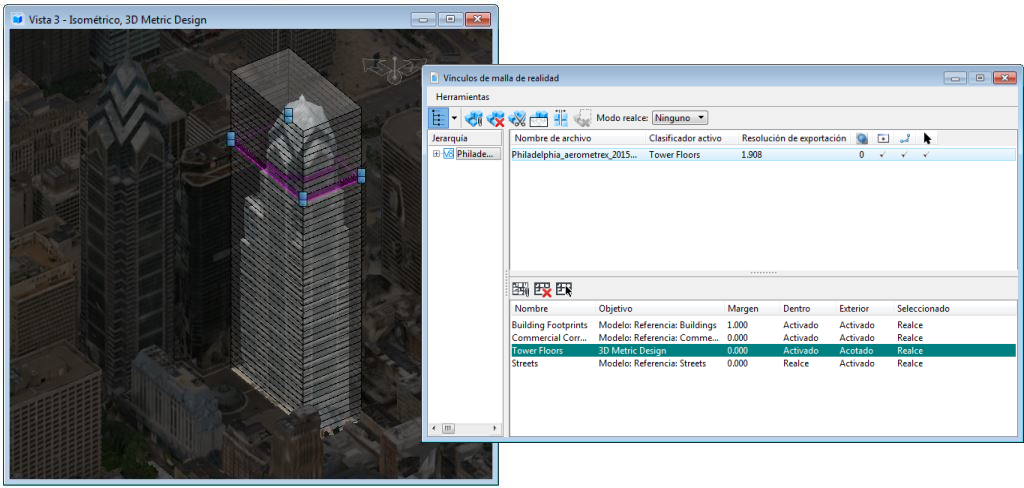
En el ejemplo de abajo, se ilustra una clasificación de los pisos de un edificio individualmente en vez del edificio entero. Una serie de paralelepípedos proporciona los clasificadores. Se puede acceder a las propiedades de los pisos (inquilinos, precio de alquiler, etc.) seleccionando de manera interactiva el modelo de realidad para acceder a estos clasificadores.
Al activar el clasificador Piso de la torre y seleccionar
Dimmed para el modo de visualización
Fuera, se resalta el edificio de su interés. Al usar la herramienta
Seleccionar clasificador de malla de realidad, puede seleccionar los pisos de la torre individualmente.