|
设置
|
描述
|
|
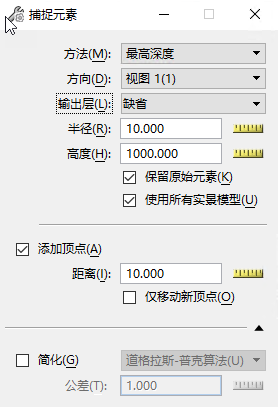
方法
|
定义捕捉方法:
-
最低点 — 寻找搜索圆柱中的最低点并将顶点元素移动到此点位置。
-
最高点 — 寻找搜索圆柱中的最高点并将顶点元素移动到此点位置。
-
最低深度 — 寻找搜索圆柱中的最低点,并移动顶点元素,以与找到的点位于相同深度(沿捕捉方向)。
-
最高深度 — 寻找搜索圆柱中的最高点,并移动顶点元素,以与找到的点位于相同深度(沿方向)。
-
平均深度 — 沿搜索圆柱内的所有点方向计算平均深度,并将顶点元素移动到计算的深度。
-
中等深度 — 沿搜索圆柱内的所有点的方向计算中等深度,并将顶点元素移动到计算的深度。
|
|
方向
|
指定圆柱定义的搜索区域的方向((圆柱轴与方向平行)。
|
|
输出层
|
选择放置捕捉到的元素的层。
选择来自元素,以将捕捉到的元素与输入元素放在同一层。
|
|
半径
|
指定搜索区域(圆柱)的半径。
|
|
高度
|
指定搜索区域(圆柱)的高度。
|
|
保留原始元素
|
保留原始捕捉元素。
|
|
使用所有实景模型
|
在处理期间使用所有连接的实景模型。
|
|
添加顶点
|
用于在初始元素上添加顶点。
|
|
距离
|
设置添加顶点后每个顶点之间的距离。
|
|
仅移动新顶点
|
仅移动自动生成的顶点。由用户创建的初始顶点保留不动。
|
|
简化
|
应用简化算法以减少生成的覆盖的元素上的点数。
道格拉斯-普克算法 — 一种减少曲线上的点,同时保持在公差内的知名算法。
流线参数:使用四个 MicroStation 流线参数执行简化。有关详细信息,请参阅 MicroStation 参考指南。
|
|
公差
|
将应用简化过程的值(采用主单位)。
|