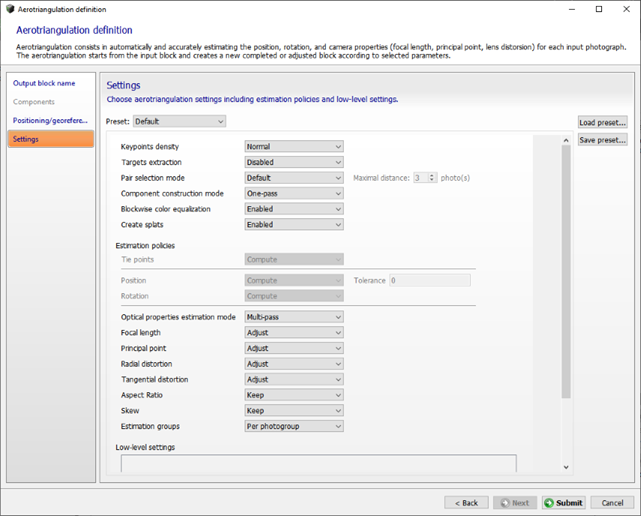
설정
항공 삼각 측량 추정 방법과 고급 설정을 선택합니다.
Presets
Presets는 사용자 인터페이스에서 액세스할 수 있는 모든 설정을 관리하며, 정확한 항공 삼각 측량 알고리즘을 제어하는 데 사용되는 저레벨의 설정을 포함할 수 있습니다.
Presets를 사용하여 사용자 설정을 저장 및 로드하거나 사전 정의된 구성을 설정할 수 있습니다.
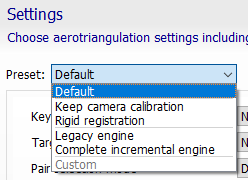
Default engine
이 사전 설정을 사용하여 최신 ContextCapture 엔진을 활성화합니다.
Legacy engine
이 사전 설정을 사용하여 이전 업데이트의 엔진을 활성화합니다.
Complete incremental engine
이 사전 설정을 사용하여 누락된 사진을 저장하거나 일부 기존 구성요소를 연결하기 위해 현재 결과(있는 경우)부터 시작할 수 있습니다.
Keypoints density
먼저 Normal 모드를 시도할 것을 권장합니다.
Target extraction
이미지에서 추출할 대상 유형을 정의합니다.
- Disabled: 대상이 추출되지 않습니다.
- QR Codes: 일반 QR 코드 및 ContextCapture 사용자 접합점 QR 코드는 사용자 접합점을 생성하는 데 사용됩니다. ContextCapture 제어점 QR 코드는 제어점을 생성하는 데 사용됩니다.
- April Tags: 사용자 접합점을 생성하거나 기존 제어점을 표시하는 데 사용됩니다.
- Chili Tags: 사용자 접합점을 생성하거나 기존 제어점을 표시하는 데 사용됩니다.
Pair selection mode
다른 선택 알고리즘을 사용하여 접합점 쌍을 계산할 수 있습니다.
- Default: 선택은 몇 가지 기준, 그 중 이미지 간의 유사성을 기반으로 합니다.
- Similar images only: 키포인트 유사성에 따라 관련 쌍을 추정합니다. 이미지 유사성이 충분히 차별적인 경우 합리적인 계산 시간으로 좋은 결과를 제공합니다.
- Exhaustive: 사진 간의 오버랩이 제한된 경우에 권장되는 모든 가능한 쌍을 사용합니다(예: 카메라 리그의 경우). 철저한 선택 계산은 훨씬 더 집약적이므로(1차보다는 2차) 적은 수의 사진(수백 개)에 예약해야 합니다.
- Sequence: 지정된 거리 내의 인접 쌍만 사용합니다. Default 모드가 실패한 경우 단일 사진 시퀀스를 처리하는 것이 좋습니다. 사진 삽입 순서는 시퀀스 순서와 일치해야 합니다.
- Loop: 루프의 지정된 거리 내에 있는 인접 쌍만 사용합니다. Default 모드가 실패한 경우 단일 사진 루프를 처리하는 것이 좋습니다. 사진 삽입 순서는 시퀀스 순서와 일치해야 합니다.
먼저 Default 모드를 시도할 것을 권장합니다.
Component construction mode
먼저 One-pass 모드를 시도할 것을 권장합니다. 이 모드는 레거시 엔진 사용 시에만 사용 가능합니다.
Blockwise color equalization
활성화되면 항공 삼각 측량 단계 동안 모든 입력 사진에 대해 자동 컬러 균등화가 계산됩니다. 이 균등화는 이미지 간의 방사 측정 차이가 큰 경우에도 모든 사진 간 형태의 일관성을 보장하는 가장 좋은 방법을 계산합니다.
이는 2단계 프로세스이며 다음 두 가지가 모두 필요합니다.
자세한 내용과 예제 결과는 "재건 처리 설정"을 참조하십시오.
Splats
활성화되면 항공 삼각 측량 동안 스플랫이 처리됩니다. 스플랫은 3D 뷰에서 블럭 표현을 풍부하게 합니다. "3D 뷰"를 참조하십시오.
Estimation methods
블럭에서 사용 가능한 데이터에 따라 다른 블럭 속성에 대한 추정 정책을 선택할 수 있습니다.
Optical properties estimation mode
먼저 One-pass 모드를 시도할 것을 권장합니다. Multi-pass 모드는 초기 매개 변수가 실제 값(예: 알 수 없는 초점 거리 또는 알 수 없는 큰 왜곡)과 거리가 멀기 때문에 AT가 실패했을 때 유용합니다. 이 모드는 계산 시간이 훨씬 더 많이 걸립니다. 가능하면 일부 참조 데이터세트로 추정된 사진 그룹 광학 속성 가져오기에 구성된 더 빠르고 강력한 방법이 선호됩니다.
Estimation groups
사진 그룹 구조를 무시하고 각 사진의 카메라 속성을 추정하려면 이 옵션을 설정합니다.
다양한 줌/초점 거리 또는 다중 카메라 시스템(카메라 리그)을 사용하여 이미지를 획득하는 데 필요할 수 있습니다.
이 옵션은 불필요하게 사용될 경우 항공 삼각 측량 정확도에 영향을 줍니다.
이 옵션을 사용하면 사진당 한 사진 그룹이 있는 출력 블럭이 생성됩니다.
Rig Synchro
리그가 정의되면 "Rig Synchro" 항목이 추가로 표시됩니다. 리그의 다른 카메라 간 동기화가 완벽하면 "Strict"를 사용하고 그렇지 않으면 "Loose"를 사용합니다.

Low-level settings
Low-level settings는 로드된 사전 설정을 통해서만 설정할 수 있습니다. 모든 항공 삼각 측량 처리 설정을 직접 제어할 수 있습니다.
항공 삼각 측량 사전 설정은 특정 문제를 해결하기 위해 기술 지원 팀에서 제공할 수 있습니다.