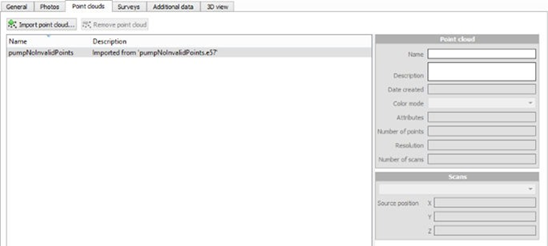
Point clouds
The Point clouds tab allows you to edit or display the set of input point clouds attached to a block.
Importing point clouds
Limitation: ContextCapture only supports point clouds with known scan source positions. Moreover, if scan source positions specified in the imported point cloud are incorrect, it will adversely affect the 3D reconstruction or even cause a completely incorrect 3D reconstruction.
The size of the imagery dataset and of the point cloud dataset may be limited according to your edition. See Software Editions.
Static scans
Point clouds can be imported from static scans in the following file formats:
When importing a georeferenced point cloud file, please specify the spatial reference system when importing the file. Multiple files can be imported at once.
The scanner position must be known to allow 3D reconstruction with ContextCapture. When it's not accessible in the input file, the scanner position can be specified manually or detected automatically by ContextCapture by checking the corresponding options. Be careful in this case that the input file corresponds to one scan acquired from one unique position. To be able to automatically detect the scanner position, the scan must contain only scanner position that is clearly defined by an ellipse of high-density points on the ground. If you are importing multiple files at once, the autodetect feature is still available and will detect one position per file.
See also Pointclouds technical specifications.
Mobile scans
Point clouds can be imported from mobile scans in the following file formats:
According to the format, the trajectories must be provided as separated text files (.txt or .csv) describing successive scanner positions associated with time. ContextCapture integrates a text file import wizard to extract trajectory data for various text formats.
3D points of the provided point clouds must also include time data to be attached properly to the trajectories.
See also Pointclouds technical specifications.
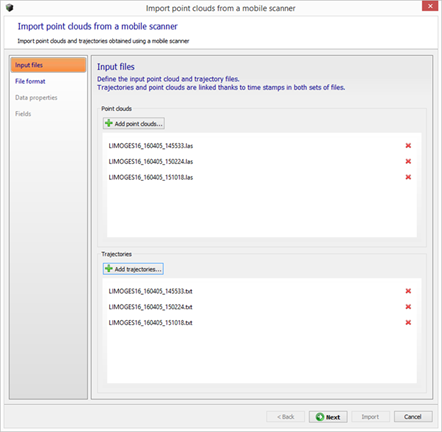
Input files
Define the input point clouds and trajectory files.
Trajectories and point clouds are linked through the time stamp in both sets of files.
File format
Define how the trajectory files must be read.
You can adjust the import parameters, so that each column in the Data preview table contains meaningful information:
- Number of lines to ignore at the beginning of the file: defines the length of the file header, and ignores it during import.
- Delimiters: defines the
column separators. Several characters can be specified.
The option Combine consecutive delimiters can be required, for instance when sequences of white spaces are used as delimiter.
- Decimal separator: dot (123.456) or comma (123,456).
Data properties
When importing a georeferenced point cloud file from mobile scans, please specify the suited spatial reference system. Note that the point clouds and the trajectories must be in the same spatial reference system.
Fields
Specify role of columns for the trajectory data.
You must associate each input column with its respective role.
X (easting), Y (northing), Z (height/altitude) and time are required.
Import Scan Collections from ProjectWiseContextShare
Download and add point clouds from scan collections on ProjectWiseContextShare.
This command allows to select scan collections from the cloud, download them, and add them to the block.
Managing point clouds
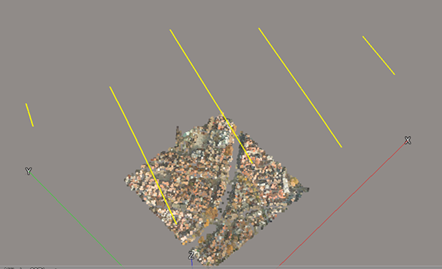
Point clouds are made of a set of scans corresponding to various scan sources with distinct positions or trajectories.
Imported point clouds and scan positions are displayable in the block's 3D view tab.
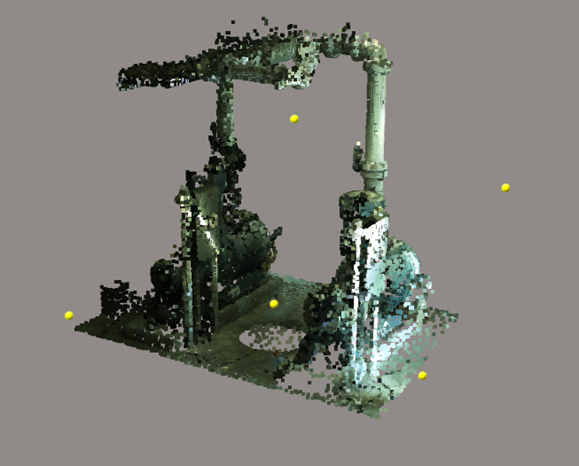
Color mode
With this property you can select the color source for point cloud 3D display and texturing of the reconstructed 3D model according to the available attributes in the imported point cloud: