点云
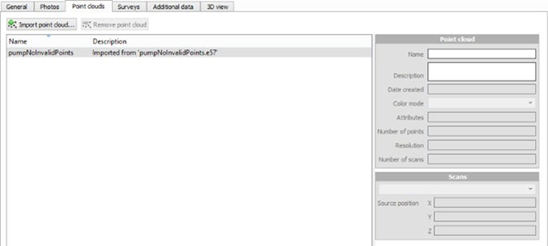
点云选项卡允许您编辑或显示附加到区块的一组点云。
导入点云
限制:ContextCapture 仅支持具有已知扫描源位置的点云。此外,如果导入的点云中指定的扫描源位置不正确,则将对三维重建造成负面影响,甚至导致完全错误的三维重建。
根据您的版本,影像数据集和点云数据集的大小可能是有限的。请参阅软件版本。
静态扫描
点云可以通过以下文件格式从静态扫描中导入:
导入具有地理参考的点云文件时,请在导入文件的同时指定空间参考系统。多个文件可同时导入。
用户可通过选择相应选项,指定手动扫描仪位置。对于 .las 和 .laz 文件,必须指定手动扫描仪位置。指定手动扫描仪位置时,一次只能导入一个文件。
另请参阅点云技术规范。
移动扫描
点云可以通过以下文件格式从移动扫描中导入:
轨迹必须作为单独的文本文件(.txt 或 .csv)提供,描述与时间相关的连续扫描仪位置。 ContextCapture 集成了文本文件导入向导,以提取不同文本格式的轨迹数据。
所提供点云的三维点也必须包括时间数据,以便正确附加到轨迹。
另请参阅点云技术规范。

输入文件
定义输入点云和轨迹文件。
在这两组文件中,轨迹和点云通过时间戳链接。
文件格式
定义必须如何读取轨迹文件。
您可以调整导入参数,使数据预览表中的每列都包含有意义的信息:
- 要在文件开头忽略的行数:定义文件头的长度并在导入过程中将其忽略。
- 分隔符:定义列分隔符。可以指定多个字符。
可能需要合并连续的分隔符选项,例如,将空格序列用作分隔符时。
- 十进制分隔符:点 (123.456) 或逗号 (123,456)。
数据属性
从移动扫描中导入具有地理参考的点云文件时,请指定适当的空间参考系统。请注意,点云和轨迹必须位于相同的空间参考系统中。
字段
为轨迹数据指定列的角色。
必须将每个输入列与其各自的角色关联。
需要 X(东距)、Y(北距)、Z(高度/海拔)和时间。
管理点云
点云由一组对应于具有不同位置或轨迹的各个扫描源的扫描组成。
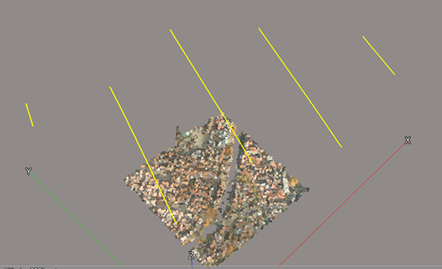
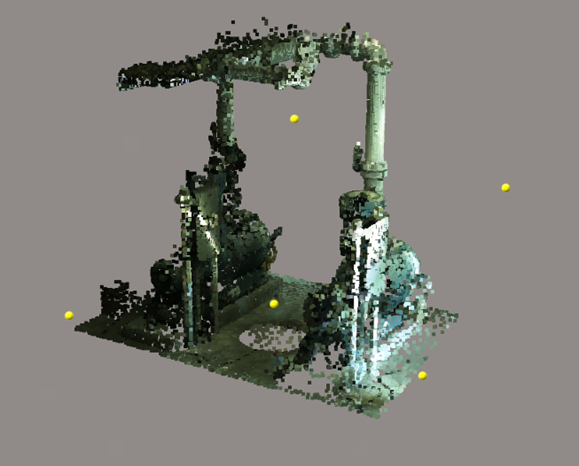
导入的点云和扫描位置可在区块的?D 视图?选项卡中显示。
彩色模式
通过此属性,您可以根据已导入点云中可用的属性为重建三维模型的点云三维显示和纹理选择颜色源: