|
Setting
|
Description
|
|
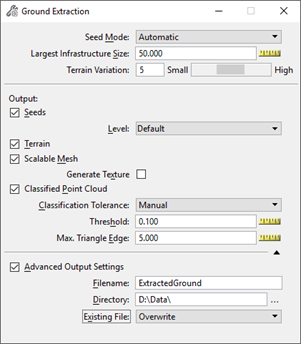
Seed Mode
|
Choose provenance of seed
points.
- Automatic: The
Largest Infrastructure Size parameter is used to compute a grid over the
reality model. The lowest points in each tiles are used as seed points.
- Points: Use
vertexes of elements found in the selected DGN Level as seed points.
KEY-IN: REALITYMODEL GROUNDEXTRACTION SEEDMODE
[AUTOMATIC | POINTS]
KEY-IN: REALITYMODEL GROUNDEXTRACTION
LEVEL
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
SEEDMODE [AUTOMATIC | POINTS]
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
LEVEL
|
|
Largest Infrastructure Size
|
Smallest side of largest man-made
object in reality model. When a grid is computed using this value, each of the
grid’s tiles must contain at least one ground point.
KEY-IN: REALITYMODEL GROUNDEXTRACTION
MAXTRIANGLEEDGE
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
MAXTRIANGLEEDGE
|
|
Terrain Variation
|
Use a smaller value when reality
model’s terrain is flat and a higher value when hilly. Default value is 5.
KEY-IN: REALITYMODEL GROUNDEXTRACTION
TERRAINVARIATION
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
TERRAINVARIATION
|
|
Output
|
At least one of the following
outputs must be selected:
- Seeds
- Terrain
- Scalable Mesh
- Classified Point
Cloud
|
|
Seeds
|
Saves automatic seed points to
the selected DGN Level. Saved seed points can be edited and reused by choosing
the Points Seed Mode.
KEY-IN: REALITYMODEL GROUNDEXTRACTION SEEDS
[ON | OFF]
KEY-IN: REALITYMODEL GROUNDEXTRACTION
LEVEL
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION SEEDS
[ON | OFF]
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
LEVEL
|
|
Terrain
|
Saves the densified TIN to a
Geopak Tin file (*.tin) and automatically generate, and attaches, a Scalable
Terrain Model.
KEY-IN: REALITYMODEL GROUNDEXTRACTION TERRAIN
[ON | OFF]
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
TERRAIN [ON | OFF]
|
|
Classified Point Cloud
|
Automatically classifies the
ground points that are within a threshold of the densified TIN. When the
reality model is a reality mesh, a point cloud is extracted according to the
reality mesh’s Export Resolution and classified.
Classification Tolerance:
- Automatic: Use
last densification parameter to compute classification threshold.
- Manual: Specify
classification threshold.
KEY-IN: REALITYMODEL GROUNDEXTRACTION CLASSIFY
[ON | OFF]
KEY-IN: REALITYMODEL GROUNDEXTRACTION
CLASSIFYMETHOD [AUTO | MANUAL]
KEY-IN: REALITYMODEL GROUNDEXTRACTION
CLASSIFYTHRESHOLD
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
CLASSIFY [ON | OFF]
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
CLASSIFYMETHOD [AUTO | MANUAL]
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
CLASSIFYTHRESHOLD
|
|
Max. Triangle Edge
|
Stop adding ground point inside
triangle for which edge length value is smaller than this threshold.
KEY-IN: REALITYMODEL GROUNDEXTRACTION
MAXTRIANGLEEDGE
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
MAXTRIANGLEEDGE
|
|
Advanced Output Settings
|
Turn advanced settings ON to
automatically create output files.
KEY-IN: REALITYMODEL GROUNDEXTRACTION
ADVANCESETTINGS [ON | OFF]
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
ADVANCESETTINGS [ON | OFF]
|
|
Filename
|
Filename to be used when output
files are created automatically.
KEY-IN: REALITYMODEL GROUNDEXTRACTION
FILENAME
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
FILENAME
|
|
Directory
|
Directory to be used when output
files are created automatically.
KEY-IN: REALITYMODEL GROUNDEXTRACTION
DIRECTORY
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
DIRECTORY
|
|
Existing File
|
Choose what to do when automatically created
output files already exist.
KEY-IN: REALITYMODEL GROUNDEXTRACTION
EXISTINGFILE [OVERWRITE | INCREMENT]
KEY-IN: POINTCLOUDADV GROUNDEXTRACTION
EXISTINGFILE [OVERWRITE | INCREMENT]
|